zynq xc7z030 board – FII-PE7030 Experiment 10 – Asynchronous Serial Port Design and Experiment
10.1 Experiment Objective
Because asynchronous serial ports are very common in industrial control, communication, and software debugging, they are also vital in FPGA development.
- Study the basic principles of asynchronous serial port communication, handshake mechanism, data frame
- Master asynchronous sampling techniques
- Review the frame structure of the data packet
- Learning FIFO
- Joint debugging with common debugging software of PC (SSCOM, teraterm, etc.)
10.2 Experiment Implement
- Design and transmit full-duplex asynchronous communication interface Tx, Rx
- Baud rate of 11520 bps, 8-bit data, 1 start bit, 1 or 2 stop bits
- Receive buffer (Rx FIFO), transmit buffer (Tx FIFO)
- Forming a data packet
- Packet parsing
10.3 Experiment
10.3.1 USB to Serial Chip (FT2232) Introduction
USB is an interface technology used in the PC field to regulate the connection and communication between computers and external devices. The USB interface supports plug-and-play and hot-swap capabilities of the device, and can connect up to 127 peripherals, such as a mouse, modem, and keyboard. However, there are still a large number of peripheral devices and software using the RS232 serial port standard. In order to take full advantage of USB, a USB-RS232 converter is designed to transmit RS232 data through the USB bus. Here, a design scheme of USB-RS232 conversion module based on FT2-232H is proposed.
The on-board serial conversion chip is FT2232, which can implement USB to two serial UART, FIFO, Bit-Bang I/O interfaces, and can also be configured as MPSSE, I2C, JTAG and SPI buses. FT2232H has 2 independent UART / FIFO controllers for controlling asynchronous data, 245 FIFO data, optical isolation (high-speed serial port) or controlling Bit-Bang mode when installing program commands; The USB protocol engine controls and manages the interface between UTMI PHY and FIFO, and is responsible for power management and USB protocol specifications; the dual-port FIFO TX buffer (4KB) stores data from the host PC and uses the data through the multi-purpose UART and FIFO controller; the dual-port FIFO RX buffer (4KB) stores the data from the multi-purpose UART / FIFO controller, and then sends the data to the host; when the reset generator module is powered on, it provides a reliable power supply reset for the internal circuit of the device. The RESETn input pin allows external devices to reset the FT2232H. If RESETn is not used, it should be connected to VCCIO (+3.3 V); the independent baud rate generator provides a × 16 or × 10 clock signal to the UART. It provides the best baud rate tuning through a 14-bit scale factor and 4 registered bits, which determines the baud rate programmable by the UART.
10.3.2 Hardware Design
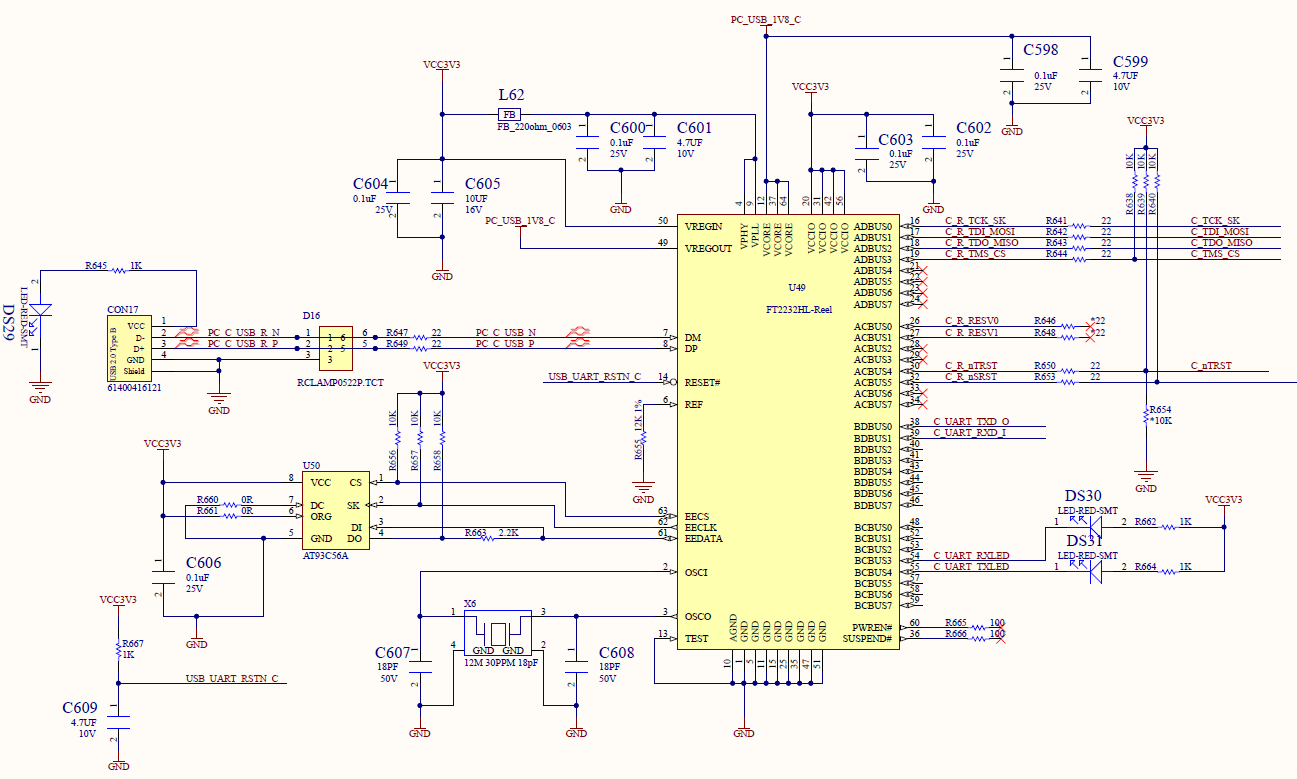
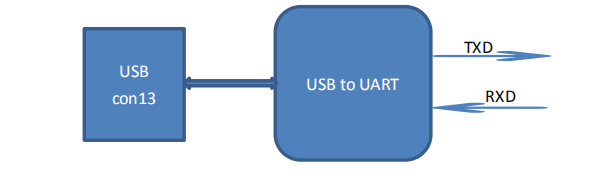
Figure 10.1 Schematics of serial port
The principle of USB serial port conversion is shown in Figure 10.1. CON17 is a USB interface. When downloading the program, it is input to the FT2232 through the two wires PC_C_USB_R_N and PC_C_USB_R_P. After internal processing, it is input into the FPGA by C_UART_TXD_O. In the serial port experiment, the sending path from the PC to the FPGA is the same as the download program path. The receiving path from the FPGA to the PC is the FPGA transmitting data from C_UART_RXD_I to the FT2232. After internal processing, the data is sent to the PC through the USB interface to achieve serial communication receive and send.
10.3.3 Program Introduction
The first step: the establishment of the main program framework (interface design)
| module uart_top
( input inclk_p, input inclk_n, input rst, input [1:0] baud_sel, input tx_wren, input tx_ctrl, input [7:0] tx_data, input tx_done, output txbuf_rdy,
input rx_rden, output [7:0] rx_byte, output rx_byte_rdy, output sys_rst, output sys_clk, input rx_in, output tx_out ); |
There are a lot of handshake signals here, with the tx prefix for the transmit part of the signal, and the rx prefix is for the receive part of the signal.
The second step: create a new baud rate generator file
- Input clock 7.3728MHz (64 times 115200). The actual value is 7.377049MHz, which is because the coefficient of the PLL is an integer division, while the error caused by that is not large, and can be adjusted by the stop bit in asynchronous communication. See Figure 10.2.
Fine solution
- Implemented with a two-stage PLL for a finer frequency
- The stop bit is set to be 2 bits, which can effectively eliminate the error. (This experiment will not deal with the precision.)
- Support output baud rate 115200, 57600, 38400, 19200
- The default baud rate is 115200
- Source file designing baud rate
| // Send baud rate, clock frequency division selection
wire [8:0] frq_div_tx; assign frq_div_tx = (baud_sel == 2’b00) ? 9’d63: (baud_sel == 2’b01) ? 9’d127: (baud_sel == 2’b10) ? 9’d255:9’d511; reg [8:0] count_tx=9’d0; always @ (posedge inclk) if (!rst) begin count_tx <= 9’d0; baud_tx <= 1’b0; end else begin if (count_tx == frq_div_tx) begin count_tx <= 9’d0; baud_tx <= 1’b1; end else begin count_tx <= count_tx + 1’b1; baud_tx <= 1’b0; end end |
Four different gear positions are set to select the baud rate, corresponding to the second step, (1). The baud rate of the receiving part is similar to that of the transmitting part.
Step 3: Design the send buffer file tx_buf
- 8-bit FIFO, depth is 256, read/write clock separation, write full flag, read empty flag
- Interface and handshake
- rst reset signal
- wr_clk write clock
- tx_clk send clock
- 8-bit write data tx_data
- wr_en write enable
- ctrl writes whether the input is a data or a control word
- rdy buffer ready, can accept the next data frame
Transmit buffer instantiation file
| tx_buf
#(.TX_BIT_LEN(8),.STOP_BIT(2)) tx_buf_inst ( .sys_rst (sys_rst), .uart_rst (uart_rst), .wr_clk (sys_clk), .tx_clk (uart_clk), .tx_baud (tx_baud), .tx_wren (tx_wren), .tx_ctrl (tx_ctrl), .tx_datain (tx_data), .tx_done (tx_done), .txbuf_rdy (txbuf_rdy), .tx_out (tx_out) ); |
- Serial transmission, interface and handshake file design
- Interface design
- tx_rdy, send vacancy, can accept new 8-bit data
- tx_en, send data enable, pass to the sending module 8-bit data enable signal
- tx_data, 8-bit data to be sent
- tx_clk, send clock
- tx_baud, send baud rate
- Instantiation
| tx_transmit
#(.DATA_LEN(TX_BIT_LEN), .STOP_BIT(STOP_BIT) ) tx_transmit_inst ( .tx_rst (uart_rst), .tx_clk (tx_clk), .tx_baud (tx_baud), .tx_en (tx_en), .tx_data (tx_data), .tx_rdy (trans_rdy), .tx_out (tx_out) ); |
- Write a testbench file to simulate the transmit module. (uart_top_tb)
- Transmit part of the ModelSim simulation waveform, as shown in Figure 10.2.
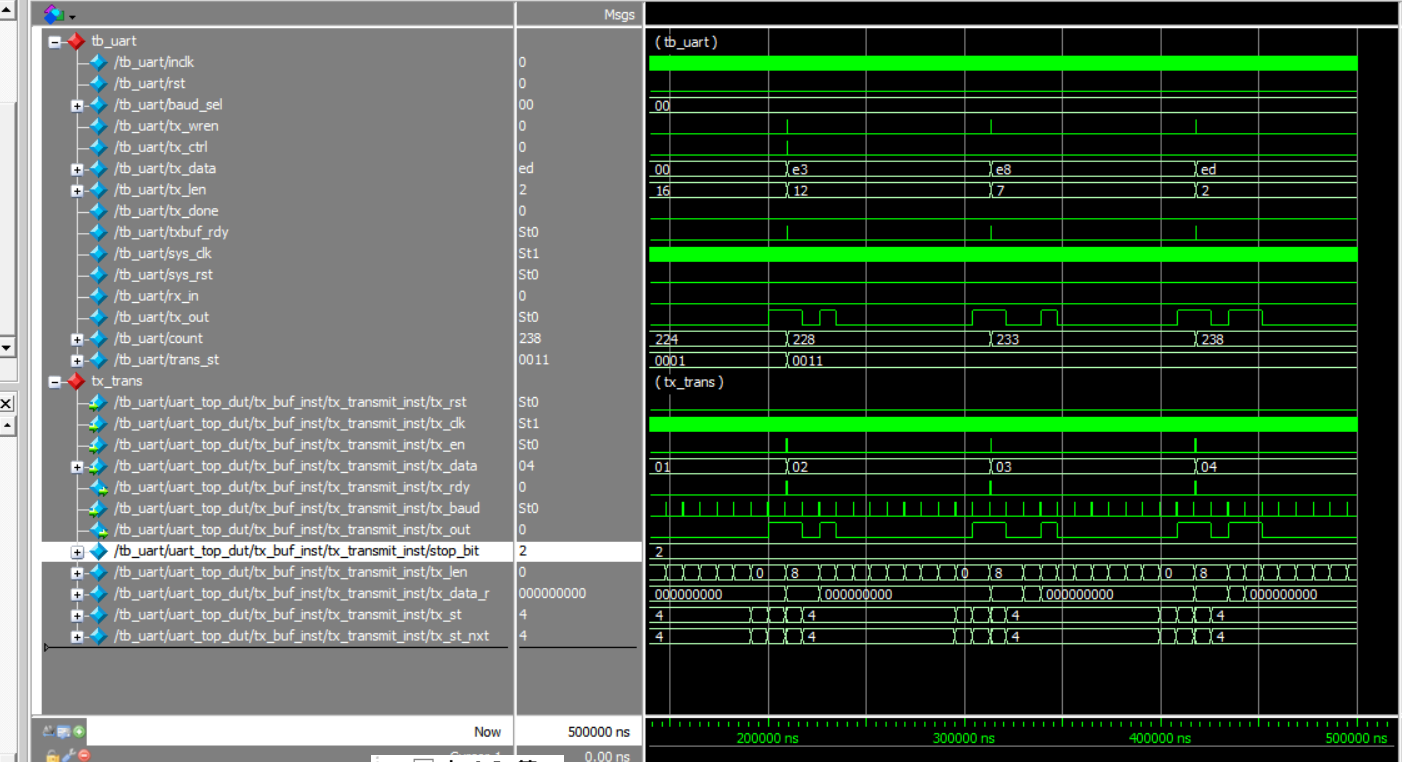
Figure 10.2 Serial port sends MoselSim simulation waveform
- Extended design (extended content is only reserved for users to think and practice)
- Design the transmitter to support 5, 6, 7, 8-bit PHY (Port physical layer)
- Support parity check
- The settings of the above steps involve FIFO, PLL, etc. (Refer to uart_top project file)
The fourth step: UART receiving module design
- Design of rx_phy.v
- Design strategies and steps
- Use 8 times sampling: so rx_baud is different from tx_baud, here sampling is rx_band = 8*tx_band
- Adopting judgments to the receiving data
Determine whether the data counter is greater than 4 after the sampling value is counted.
- Steps to receive data:
- Synchronization: refers to how to find the start bit from the received 0101 (sync_dtc)
- Receive start bit (start)
- Cyclically receive 8-bit data
- Receive stop bit (determine whether it is one stop bit or two stop bits)
- Determine if the stop bit is correct
- Correct, jump to step B
- Incorrect, jump to step A, resynchronize
- Do not judge, jump directly to B, this design adopts the scheme of no judgment
- Design of rx_buf
- Design strategies and steps
- Add 256 depth, 8-bit fifo
- Read and write clock separation
- Asynchronous clear (internal synchronization)
- Data appears before the rdreq in the read port
- Steps:
- Initialization: fifo, rx_phy
- Wait: FIFO full signal (wrfull) is 0
- Write: Triggered by rx_phy_byte, rx_phy_rdy of rx_phy:
- End of writing
- Back to step b and continue to wait
- rx_buf.v source program (Reference to project files)
- Receive module simulation
Content and steps
- tx, rx loopback test (assign rx_in = tx_out)
- Continue to use the testbench file in the TX section
- Write the testbench of rx
- ModelSim simulation. See Figure 10.3.
- Reflection and development
- Modify the program to complete the 5, 6, 7, 8-bit design
- Completing the design of the resynchronization when the start and stop have errors of the receiving end rx_phy
- Complete the analysis and packaging of the receiving data frame of rx_buf
- Using multi-sampling to design 180° alignment data sampling method, compare FPGA resources, timing and data recovery effects
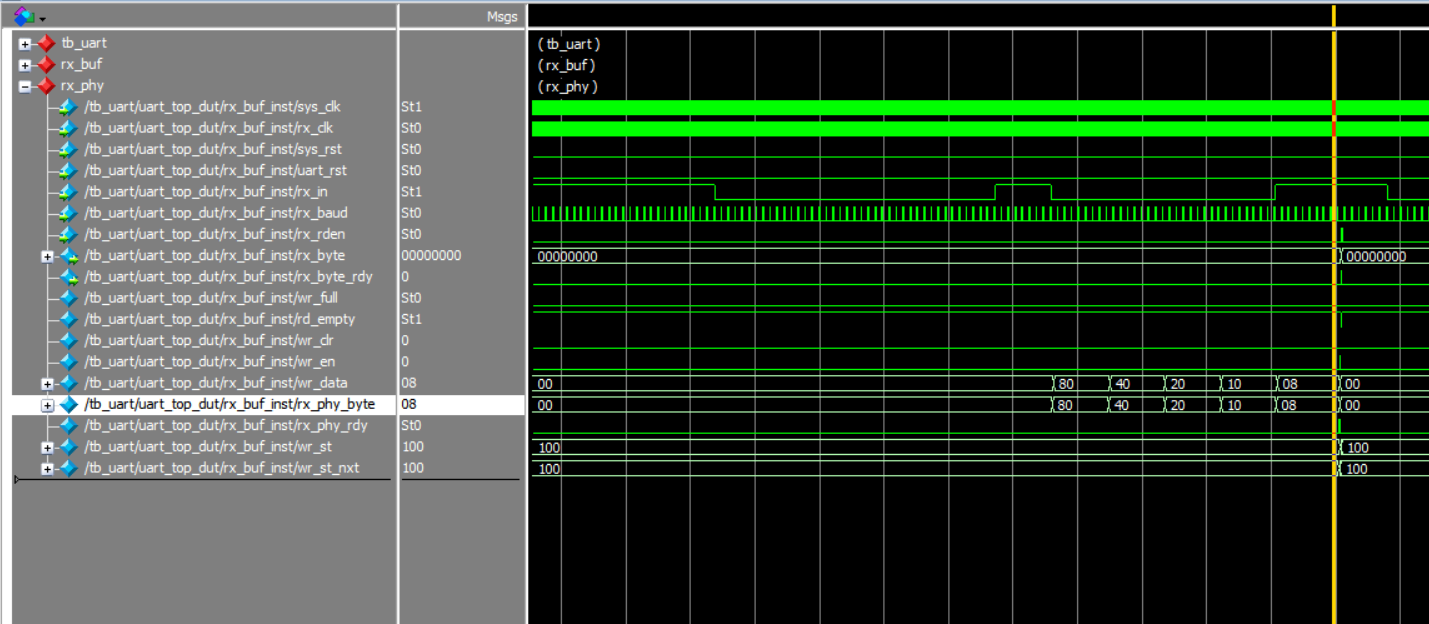
Figure 10.3 rx_phy waveform
10.4 Experiment Verification
- Hardware interface, Zynq_7030 development board has integrated USB to serial port conversion
- Write a hardware test file
- Test plan: connect development board CON13 to host USB interface
- Using test software such as teraterm, SSCOM3, etc., you can also write a serial communication program (C#, C++, JAVA, Python…)
- PC sends data in a certain format
- The test end uses a counter to generate data in a certain format.
- Write the test program uart_hw_test and instantiate uart_top in it.
- Set uart_hw_test to the top level, instantiate the previous program, and then verify it
- Pin assignmnets:
Assign pins: shown in Table 10.1.
Table 10.1 Serial port experimental pin mapping table
| Signal Name | Network Name | FPGA Pin | Port Description |
| inclk_p | SYSCLK_P | AC13 | Input clock(differential)
200MHz |
| inclk_n | SYSCLK_N | AD13 | |
| rst | GPIO_SW_2 | F4 | Reset |
| rx_in | FPGA_RXI | AC26 | Serial data input signal |
| tx_out | FPGA_TXO | ZE22 | Serial data output signal |
- Experiment phenomenon: observe the data received by the PC. See Figure 10.4.
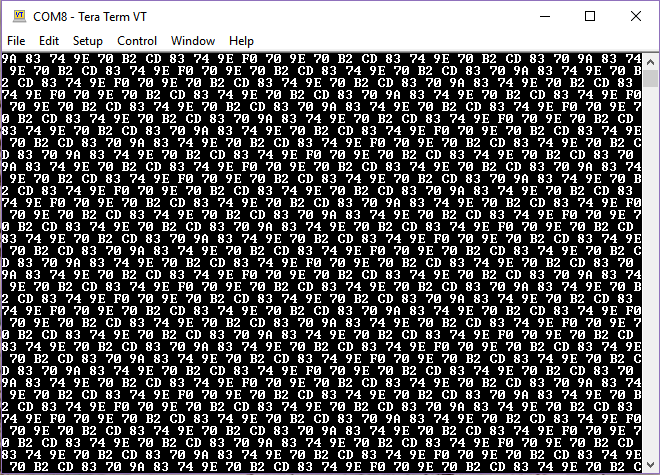
Figure 10.4 Sent data received on the host computer